Tutorial¶
Introduction¶
This tutorial focuses on functionality provided by dm_robotics_panda.
Although the examples provide a fully implemented starting point, for more details
on how to prepare reinforcement learning environments please refer to the material
provided with the dm_robotics
and by extension dm_control repositories.
Note
This section is implemented in examples/minimal_working_example.py.
Run this file or any of the examples with the --gui option or -g
to run the simulation in the visualization app.
A minimum working example consists of a robot configuration, an environment,
an agent that controls the robot, and a method to run the environment.
dm_robotics.panda.environment.PandaEnvironment is the main point of interaction.
This class populates the environment with Panda robots configured using
dm_robotics.panda.parameters.RobotParams.
robot_params = params.RobotParams()
panda_env = environment.PandaEnvironment(robot_params)
with panda_env.build_task_environment() as env:
...
The MoMa task environment returned by build_task_environment() can then be executed
by dm_robotics.panda.run_loop.run() or visualized with
dm_robotics.panda.utils.ApplicationWithPlot. The visualization app
is a convenient tool to debug environments or evaluate agents and
includes live plots of observations, actions, and rewards.
Finally, we require an agent that provides actions in the form of NumPy arrays
according to the environment’s specification. A minimal agent provides a step
function that receives a timestep and returns an action.
class Agent:
def __init__(self, spec: specs.BoundedArray) -> None:
self._spec = spec
def step(self, timestep: dm_env.TimeStep) -> np.ndarray:
action = np.zeros(shape=self._spec.shape, dtype=self._spec.dtype)
return action
The shape of the action will depend on the number of configured robots and chosen actuation mode.
Motion Control¶
By default the robots use a Cartesian velocity motion
controller
from dm_robotics that uses quadratic programming to solve a stack-of-tasks optimization problem.
The actuation mode is configured as part of the robot parameters as defined in
dm_robotics.panda.arm_constants.Actuation.
The motion of the Panda robot is controlled through the agent interface.
Agents need to provide a step() function that accepts a dm_env timestep and returns
an action (control signal) in the form of a NumPy array.
Note
The examples in this section support optional hardware in the loop (HIL) mode. You can run the examples
with HIL by executing the files with the --robot-ip option set to the hostname or IP address
of a robot connected to the host computer. This option can be combined with --gui for visualization.
Beware that the robot will try to move into the initial pose of the simulation. You can set the initial
position by setting joint_positions in the robot parameters.
When running any of the examples, the action specification (shape) of the configured actuation mode along with the observation and reward specification will be printed in the terminal for convenience.
Joint¶
Joint velocity control is activated as part of the robot configuration.
robot_params = params.RobotParams(actuation=arm_constants.Actuation.JOINT_VELOCITY)
The action interface is a 7-vector where each component controls the corresponding joint’s velocity. If the Panda gripper is used (default behavior) there is one additional component to control grasping.
class Agent:
"""This agent produces a sinusoidal joint movement."""
def __init__(self, spec: specs.BoundedArray) -> None:
self._spec = spec
def step(self, timestep: dm_env.TimeStep) -> np.ndarray:
"""Computes sinusoidal joint velocities."""
time = timestep.observation['time'][0]
action = 0.1 * np.sin(
np.ones(shape=self._spec.shape, dtype=self._spec.dtype) * time)
action[7] = 0 # gripper action
return action
agent = Agent(env.action_spec())
Where env.action_spec() is the MoMa subtask environment returned by build_task_environment()
that is used to retrieve the environment’s action specification. This example will result in a small
periodic motion and is implemented in examples/motion_joint.py. See below for a video of the example
running with HIL and the visualizaiton app.
Cartesian¶
Cartesian velocity control is the default behavior but can also be configured explicitly as part of a robot’s configuration.
robot_params = params.RobotParams(actuation=arm_constants.Actuation.CARTESIAN_VELOCITY)
The effector’s (controller’s) action space consists of a 6-vector where the first three indices correspond to the desired end-effector velocity along the control frame’s x-, y-, and z-axis. The latter three indices define the angular velocities respectively. If no control frame is configured, the world frame is used as a reference.
class Agent:
"""The agent produces a trajectory tracing the path of an eight
in the x/y control frame of the robot using end-effector velocities.
"""
def __init__(self, spec: specs.BoundedArray) -> None:
self._spec = spec
def step(self, timestep: dm_env.TimeStep) -> np.ndarray:
"""Computes velocities in the x/y plane parameterized in time."""
time = timestep.observation['time'][0]
r = 0.1
vel_x = r * math.cos(time) # Derivative of x = sin(t)
vel_y = r * ((math.cos(time) * math.cos(time)) -
(math.sin(time) * math.sin(time)))
action = np.zeros(shape=self._spec.shape, dtype=self._spec.dtype)
# The action space of the Cartesian 6D effector corresponds
# to the linear and angular velocities in x, y and z directions
# respectively
action[0] = vel_x
action[1] = vel_y
return action
This agent computes velocities parameterized in simulation time to produce a path that roughly traces the shape of an eight in the x/y plane. Note that this agent does not implement a trajectory follower but rather applies end-effector velocities in an open loop manner. As such the path may drift over time. In practice we would expect more sophisticated (learned) agents to take the current observation (state) into account.
The video below demonstrates the example implemented in examples/motion_cartesian.py
with HIL and visualization.
Gripper¶
The Panda’s gripper (officially called the Franka Hand) is not easy to model as it doesn’t feature a real-time control interface and is affected by hysteresis. Because of this, the gripper’s MoMa effector features only a binary action space, allowing for an outward and an inner grasp corresponding to action values 0 and 1 respectively. Internally the gripper’s effector maps actions to 0 if < 0.5 and 1 otherwise. The gripper is attached by default, however this behavior can be deactivated or explicitly set in the robot configuration.
robot_params = params.RobotParams(has_hand=True)
The example implemented in examples/gripper.py includes a simple agent that generates random actions
to illustrate the gripper’s behavior.
class Agent:
"""This agent controls the gripper with random actions."""
def __init__(self, spec: specs.BoundedArray) -> None:
self._spec = spec
def step(self, timestep: dm_env.TimeStep) -> np.ndarray:
"""Every timestep, a new random gripper action is generated
that would result in either an outward or inward grasp.
However, the gripper only moves if 1) it is not already moving
and 2) the new command is different from the last.
Therefore this agent will effectively result in continuously
opening and closing the gripper as quickly as possible.
"""
del timestep
action = np.zeros(shape=self._spec.shape, dtype=self._spec.dtype)
action[6] = np.random.rand()
return action
Note how, in the video below, the grasp adapts to the size of an object placed between the gripper’s fingers. This can also be observed in the gripper’s width observation plot.
Haptic Interaction¶
The haptic actuation mode is a special mode that renders constraint forces from
the simulation on the real robot when used with HIL. This allows users to haptically
interact with the simulation through the robot. Haptic mode is activated through the
robot configuration. Additional settings include joint_damping which is usually
set to 0.
robot_params = params.RobotParams(robot_ip=args.robot_ip,
actuation=arm_constants.Actuation.HAPTIC,
joint_damping=np.zeros(7))
panda_env = environment.PandaEnvironment(robot_params,
arena,
control_timestep=0.01)
Setting the MoMa control timestep to a small value will improve quality and stability of the
physical interaction. The example implemented in examples/haptics.py loads a simple scene
from an MJCF file that includes a static cube.
# Load environment from an MJCF file.
XML_PATH = os.path.join(os.path.dirname(__file__), 'assets', 'haptics.xml')
arena = composer.Arena(xml_path=XML_PATH)
The video below demonstrates haptic interaction mode. Note that the HIL connection feeds measured external forces back into the simulation which can be accessed as observations.
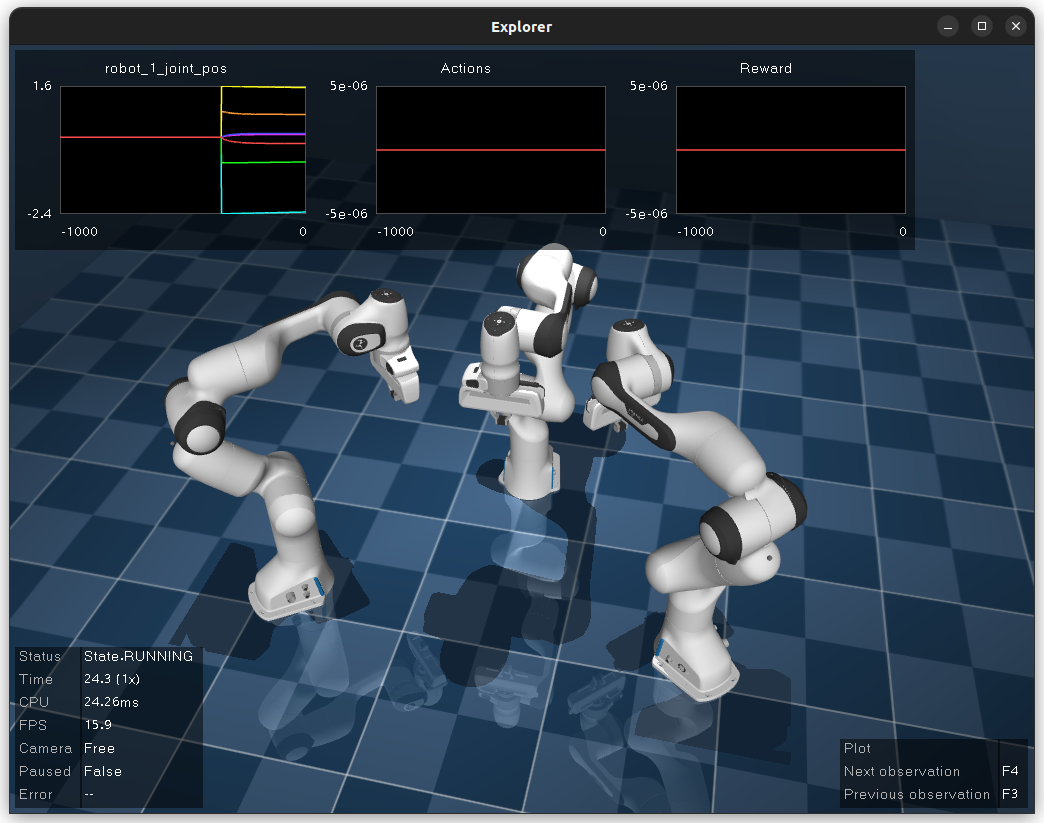
Multiple Robots¶
Populating an environment with multiple Panda robots is done by simply
creating multiple robot configurations and using them to instantiate
dm_robotics.panda.environment.PandaEnvironment.
robot_1 = params.RobotParams(name='robot_1', pose=[0, 0, 0, 0, 0, 0])
robot_2 = params.RobotParams(name='robot_2',
pose=[.5, -.5, 0, 0, 0, np.pi * 3 / 4])
robot_3 = params.RobotParams(name='robot_3',
pose=[.5, .5, 0, 0, 0, np.pi * 5 / 4])
panda_env = environment.PandaEnvironment([robot_1, robot_2, robot_3])
The pose parameter is a 6-vector that describes a transform (linear displacement and Euler angles)
to a robot’s base. Without this configuration the three robots would spawn in same location.
A minimal example of multiple robot is implemented in examples/multiple_robots.py
and shown below.
In a more sophisticated application we can build a simple robot with a branching kinematic structure.
For this purpose we modeled a stationary robot with a hinge joint around its main axis. The MJCF file
includes site elements as part of the robot’s body that define the attachment as well as control
frames.
XML_PATH = os.path.join(os.path.dirname(__file__), 'assets', 'two_arm.xml')
arena = composer.Arena(xml_path=XML_PATH)
left_frame = arena.mjcf_model.find('site', 'left')
right_frame = arena.mjcf_model.find('site', 'right')
control_frame = arena.mjcf_model.find('site', 'control')
Using an attachment frame is different from using the pose parameter in so far as the
attached Panda robot will be a child of the body containing the attachment site. The
control frame is the reference frame used by the Cartesian velocity motion controller.
It is also used to compute pose, velocity and wrench observations in control frame.
left = params.RobotParams(attach_site=left_frame,
name='left',
control_frame=control_frame)
right = params.RobotParams(attach_site=right_frame,
name='right',
control_frame=control_frame)
env_params = params.EnvirontmentParameters(mjcf_root=arena)
panda_env = environment.PandaEnvironment([left, right], arena)
By using the same control frame attached to the robot’s body for both arms, the Cartesian motion of the
arms is invariant to the rotation of the robot (i.e. the reference frame rotates with the main body).
This can be seen in examples/two_arm_robot.py. In this example the agent produces a sinusoidal velocity
action along the x-axis for both arms. In the video below, the user can be seen to interact with the robot
body to rotate it, while the motion remains invariant.
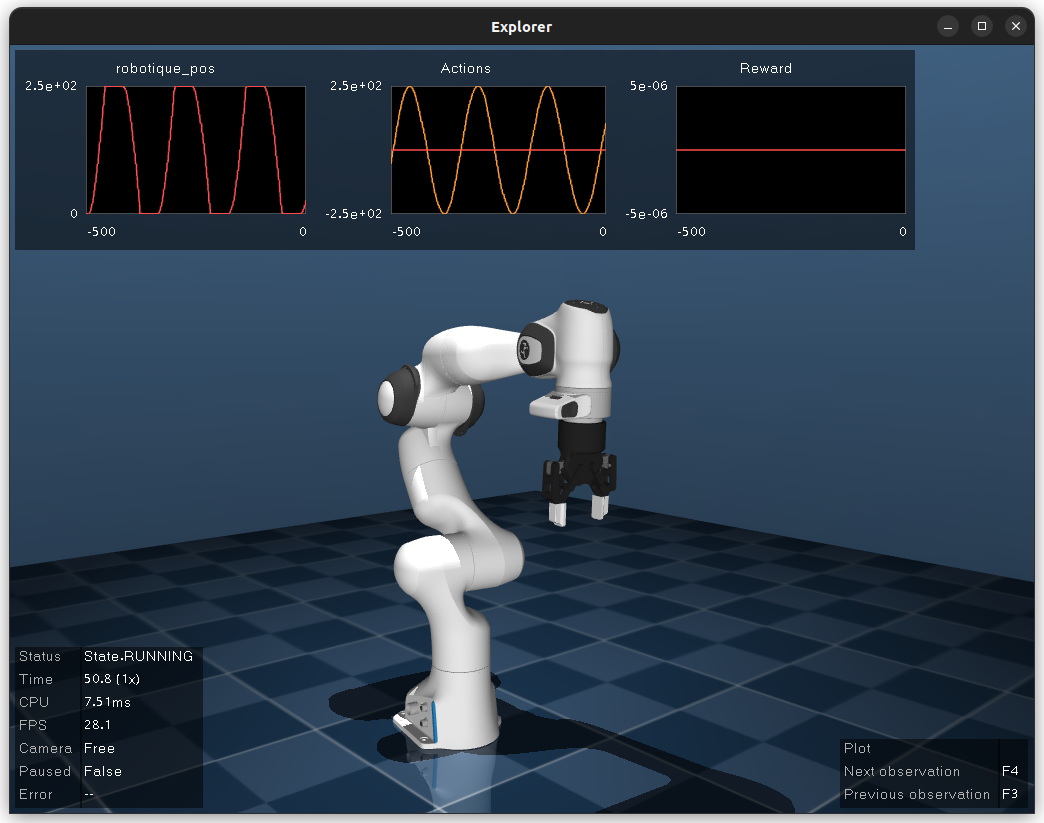
Custom Gripper¶
You can use the Panda model with any gripper that implements the dm_robotics gripper interface.
The example implemented in examples/custom_gripper.py uses a model of the Robotiq 2-finger 85
gripper, sensor and effector to attach to a Panda robot. This is again done using the robot configuration.
gripper = robotiq_2f85.Robotiq2F85()
gripper_params = params.GripperParams(
model=gripper,
effector=default_gripper_effector.DefaultGripperEffector(
gripper, 'robotique'),
sensors=[
robotiq_gripper_sensor.RobotiqGripperSensor(gripper, 'robotique')
])
robot_params = params.RobotParams(gripper=gripper_params, has_hand=False)
Gripper parameters above include model, sensors and an effector that are part of the robot configuration.
You also need to set has_hand to False, otherwise the Panda gripper will be used. The Robotiq gripper
can be controlled continuously and the example uses a simple agent to apply a sinusoidal action to control
the gripper. The resulting model is pictured below.
RL Environment¶
This section briefly introduces some of the key concepts of designing a reinforcement learning
environment in the dm_robotics framework and illustrates how to integrate these with
dm_robotics_panda. This section is implemented in examples/rl_environment.py.
Props¶
Props are dynamic objects in the environment that can be manipulated. They are based on MuJoCo elements that are built by the prop’s class and attached to the scene.
class Ball(prop.Prop):
"""Simple ball prop that consists of a MuJoco sphere geom."""
def _build(self, *args, **kwargs):
del args, kwargs
mjcf_root = mjcf.RootElement()
# Props need to contain a body called prop_root
body = mjcf_root.worldbody.add('body', name='prop_root')
body.add('geom',
type='sphere',
size=[0.04],
solref=[0.01, 0.5],
mass=1,
rgba=(1, 0, 0, 1))
super()._build('ball', mjcf_root)
The code above defines a new prop class. A minimal prop implementation needs to overwrite the
_build function to construct an MJCF root element that has at least a body called prop_root
attached. The positional and keyword arguments passed to the _build function are the same
as the constructor’s, but it’s not recommended to overwrite the constructor itself. To attach
props, we simply instantiate them and add them to dm_robotics.panda.environment.PandaEnvironment.
ball = Ball()
props = [ball]
for i in range(10):
props.append(rgb_object.RandomRgbObjectProp(color=(.5, .5, .5, 1)))
panda_env.add_props(props)
In the code snippet above, in addition to the ball, we add 10 random props from the RGB object family
that is part of dm_robotics.manipulation.
Cameras¶
Cameras are modelled in MuJoCo directly. This can be done in an MJCF file as part of the environment description and loaded from file as an arena. Alternatively, camera elements can be added through code. The latter allows us to attach cameras to the robots as well.
# Use the robot added by PandaEnvironment to add a MuJoCo camera element to the gripper.
panda_env.robots[robot_params.name].gripper.tool_center_point.parent.add(
'camera',
pos=(.1, 0, -.1),
euler=(np.pi, 0, -np.pi / 2),
fovy=90,
name='wrist_camera')
The camera element is attached to the parent body of the tool center point as cameras cannot be child elements of site elements. The pose relative to the parent (in this case the wrist) is chosen so the camera looks along the end-effector. We can use this camera in the visualization app, to render out images from code, or to add images to the observation.
Reward and Observation¶
An environment’s reward and observation are conferred as part of the timestep.
In the dm_robotics framework the timestep may be modified by timestep preprocessors
to add or modify rewards and observations. There are many timestep preprocessors as part
of the framework that cover common applications. While timestep preprocessors can add
arbitrary observations to a timestep, MoMa sensors may also add observations related to
MuJoCo model elements such as cameras or props.
# Extra camera sensor that adds camera observations including rendered images.
cam_sensor = camera_sensor.CameraImageSensor(
panda_env.robots[robot_params.name].gripper.mjcf_model.find(
'camera', 'wrist_camera'), camera_sensor.CameraConfig(has_depth=True),
'wrist_cam')
# Extra prop sensor to add ball pose to observation.
goal_sensor = prop_pose_sensor.PropPoseSensor(ball, 'goal')
panda_env.add_extra_sensors([cam_sensor, goal_sensor])
We make use of MoMa sensors to add camera and prop observations to the timestep. The camera sensor
takes a camera element and configuration and adds rendered images as well as the camera’s instrinsic
parameters with the prefix wrist_cam to the observation. Similarly the prop sensor takes a prop
and adds a pose observation with the prefix goal.
Keep in mind that we used MoMa sensors to add fitting observations for convenience. You are free to implement your own preprocessors to manipulate the timestep as you see fit. Next we will make use of predefined timestep preprocessors to add a reward.
def goal_reward(observation: spec_utils.ObservationValue):
"""Computes a normalized reward based on distance between end-effector and goal."""
goal_distance = np.linalg.norm(observation['goal_pose'][:3] -
observation['panda_tcp_pos'])
return np.clip(1.0 - goal_distance, 0, 1)
reward = rewards.ComputeReward(goal_reward)
panda_env.add_timestep_preprocessors([reward])
ComputeReward is a timestep preprocessor that computes a reward based on a callable that takes
an observation and returns a scalar which is added to the timestep. The callable goal_reward
computes a reward based on the distance between the robot’s end-effector and the ball’s pose
observation which we added above.
Domain Randomization¶
The dm_robotics framework includes several tools for domain randomization.
These can be implemented as scene and entity initializers. The former is executed
before the model is compiled and the latter afterwards. As such, scene initializers
can be used to change the MJCF itself and entity initializers are used to change the
initial state of the model.
Note
While your are free to implement your own initializers by extending
dm_robotics.moma.base_task.SceneInitializer and
dm_robotics.moma.entity_initializer.base_initializer.Initializer.
In this section we demonstrate the principle by using existing initializers.
initialize_props = entity_initializer.prop_initializer.PropPlacer(
props,
position=distributions.Uniform(-.5, .5),
quaternion=rotations.UniformQuaternion())
The prop placer is an entity initializer that places multiple props around the environment. The initializer takes variation objects to determine the Cartesian position and orientation of the props. In the example above we use uniform distributions that are sampled by the initializer to randomly place the props. Additionally, the initializer places the props in a way that they do not collide with the environment.
# Uniform distribution of 6D poses within the given bounds.
gripper_pose_dist = pose_distribution.UniformPoseDistribution(
min_pose_bounds=np.array(
[0.5, -0.3, 0.7, .75 * np.pi, -.25 * np.pi, -.25 * np.pi]),
max_pose_bounds=np.array(
[0.1, 0.3, 0.1, 1.25 * np.pi, .25 * np.pi / 2, .25 * np.pi]))
# The pose initializer uses the robot arm's position_gripper function
# to set the end-effector pose from the distribution above.
initialize_arm = entity_initializer.PoseInitializer(
panda_env.robots[robot_params.name].position_gripper,
gripper_pose_dist.sample_pose)
The pose initializer sets the pose of a single entity by first calling a sampler callable to
retrieve a pose and then a second callable to set the pose. We can make use of this to sample
random Cartesian 6D poses within bounds from UniformPoseDistribution and then apply those
poses to the end-effector by using dm_robotics.panda.arm.Arm.position_gripper() to
position the arm accordingly with inverse kinematics.
Finally, the example is demonstrated in the video below. Note that you can reset the episode in the visualization app by pressing backspace. For more information on how to interact with the app Press F1 to view a help screen.